产品特点:
◆ 较低的价格,可以让众多学生同时动手实验,引领国内惯导/航姿/运动传感教学和实验进入普及化时代;
◆ 国内首家配备低成本电动转台,可做定量实验,更好的掌握惯导/航姿/运动传感技术;
◆ 提供全面的相关教学和实验配套服务,减轻教师的负担;
◆ 集成度高,包含了各类运动相关传感器;
◆ 实验覆盖全面,从单一运动传感器实验到所有运动传感器融合的综合实验;
◆ 通过自身在国内惯导/航姿/运动传感领域的技术,实现惯导/航姿/运动传感实验室方案的不断升级,真正使高校教学/实验/科研水平跟上技术发展的潮流;
◆ 可为学校量身定做相关实验系统。
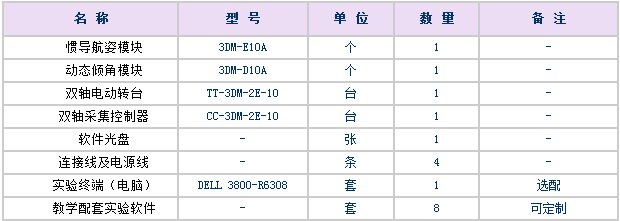
实验设备:
1、惯导/航姿模块
该模块是一款微型的全姿态测量传感装置,它由三轴MEMS陀螺、三轴MEMS加速度计、三轴磁阻型磁强计等三种类型的传感器构成。三轴陀螺用于测量载体三个方向的的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中,主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。可提供的输出数据有:原始数据、四元数、姿态数据等。
◆ 输出数据格式:原始数据、姿态角、四元数
◆ 内部更新率:>100 Hz
◆ 启动时间:< 1s
◆ 静态角度误差(俯仰、滚动):± 0.1°
◆ 动态角度误差(俯仰、滚动):± 1.0°
◆ 静态角度误差(航向):± 0.5°
◆ 动态角度误差(航向):± 2°
◆ 航向角分辨率:<0.1°
◆ 功耗:<300 mW
◆ 尺寸:28 mm x34 mm x19 mm (长x宽x高)
◆ 重量:18g
◆ 工作温度范围: -40~+85°C
2、双轴电动转台
机械台体采用UO形铝合金框架结构,由内环横滚轴框架和外环俯仰轴框架组成相互垂直的转动架构,采用直流电机驱动旋转,实现三维空间任意位置和角度的姿态测量。具有位置、速率和摇摆三种测试功能。
◆ 负载尺寸:50mm×50mm×50mm
◆ 负载重量:0.5 kg
◆ 双轴转角范围:连续无限(可以根据需要限位)
◆ 角位置综合测量精度:±0.08°
◆ 控制到位精度:±0.01°
◆ 速率范围:0.1°/s~50°/s
◆ 速率精度与平稳度:1%
◆ 台体外形尺寸:510mmL×200mmW×469mmH
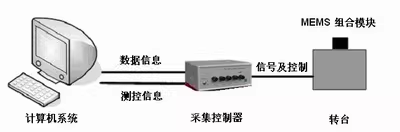
3、双轴采集控制器
采集控制器通过USB或串行接口连接计算机实现航姿模块信号的采集与电动转台的测量控制。
◆ 测角数据采集频率:20Hz
◆ 外形尺寸:260mmW×230mmW×88mmH
◆ 串口波特率:115200 bps
◆ 工作电源:220VAC/200W
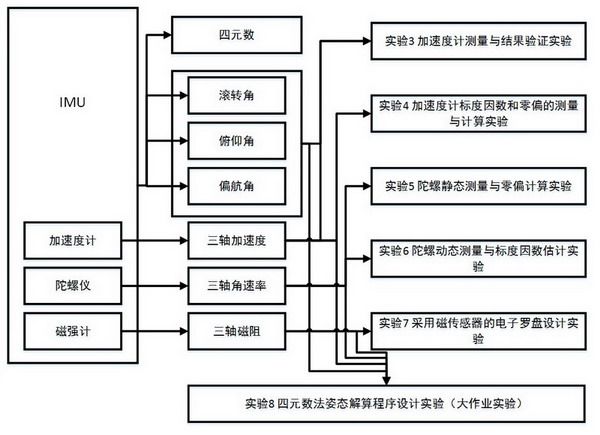
基本实验:
系统配置: